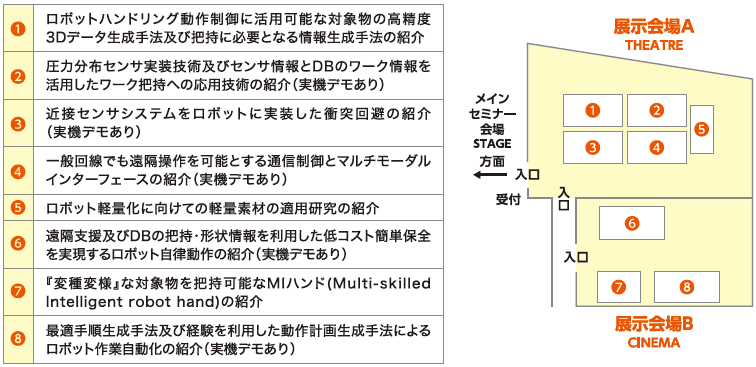
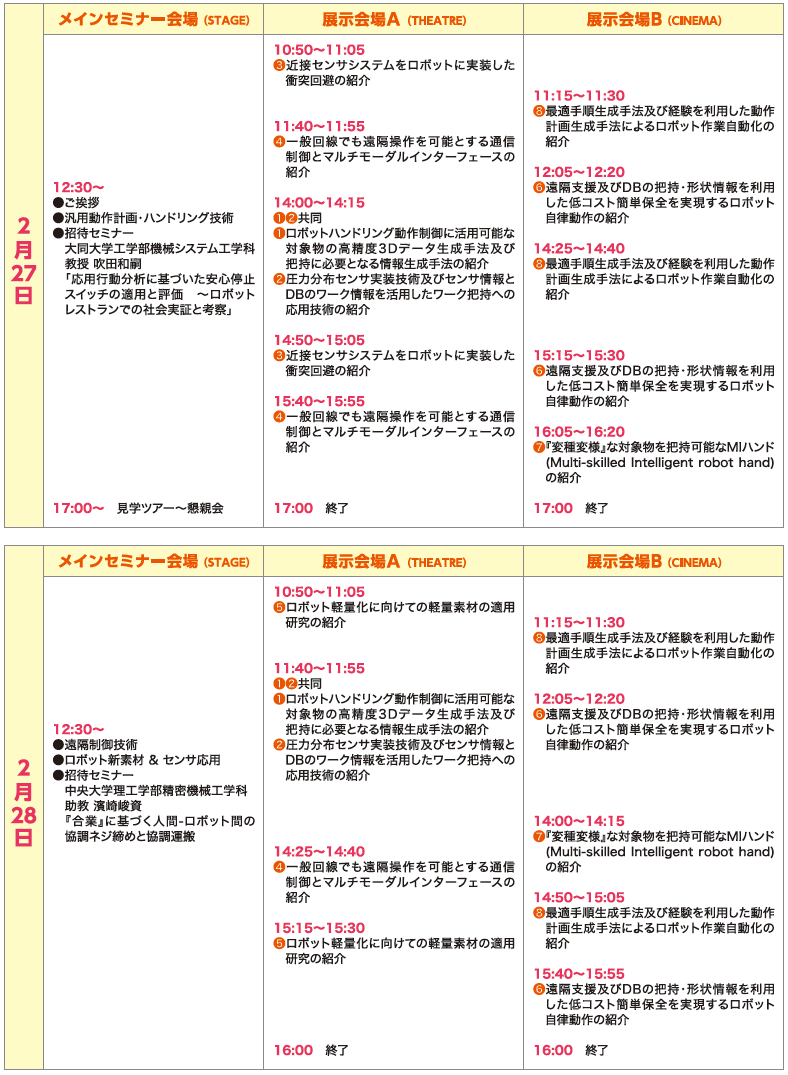
2025.01.20 ROBOCIP研究成果報告会~人とロボットとの協働社会を目指して~ 開催のご案内 【2.19更新】By コバーン 幸江 / 1月 20, 2025 当組合が設立より4年半に渡って推進してきた研究事業の成果発表会を「ROBOCIP研究成果報告会~人とロボットとの協働社会を目指して~」と題して、以下の要領で開催いたします。 (本研究事業は国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)の「革新的ロボット研究開発基盤構築事業」の一環として同機構の助成を受けております。) 「ハンドリング・汎用動作計画技術」「遠隔制御技術」「ロボット新素材・センサ応用技術」の各研究テーマを中心に実機デモなどで研究成果をご紹介いたします。 どなたでもご参加いただけますので、ご希望の方は以下の回答フォームにご記入の上、お申し込みください。 皆様のご参加をお待ちしております。 【日時】2025年2月27日(木) 10:00~19:00(展示は17時まで) 2月28日(金) 10:00~16:00 【会場】CO-CREATION PARK – KAWARUBA 内 羽田イノベーションシティ Zone-B 2階 京浜急行電鉄・東京モノレール「天空橋」駅直結 アクセスはこちら(外部リンク) ★ご参加について:事前登録をお願いします。 当会場では顔認証システムを採用しており、ご来場いただく方には事前に顔認証登録をお願いしております。 下記URLより事前にご回答を頂きますと、ご指定のメール先に顔認証登録案内メールを送付いたします。 回答フォーム ※上記フォームからの受付は終了いたしました。今後のお申込みは当日会場の入場口受付にて承ります。 展示ブースご案内 デモ・説明タイムテーブル(予定) ※両日ともに途中参加・途中退出可能ですのでご都合のよい時にお越しください。 KAWARUBA見学ツアー・懇親会 ●2月27日(木) 17:00~ KAWARUBA見学ツアー ※30-40分程度、実機デモ見学等含む 見学ツアー後、KAWARUBA内にて懇親会を開催します。(無料、参加制限なし) 見学ツアーのみ、懇親会のみのご参加も可能です。